

3回目の投稿
抜粋の練習

HackRF One
HackRF Oneはソフトウエア制御による1MHzから6GHzにわたる広帯域送受信機(ソフトウェアラジオ:SDR)です。
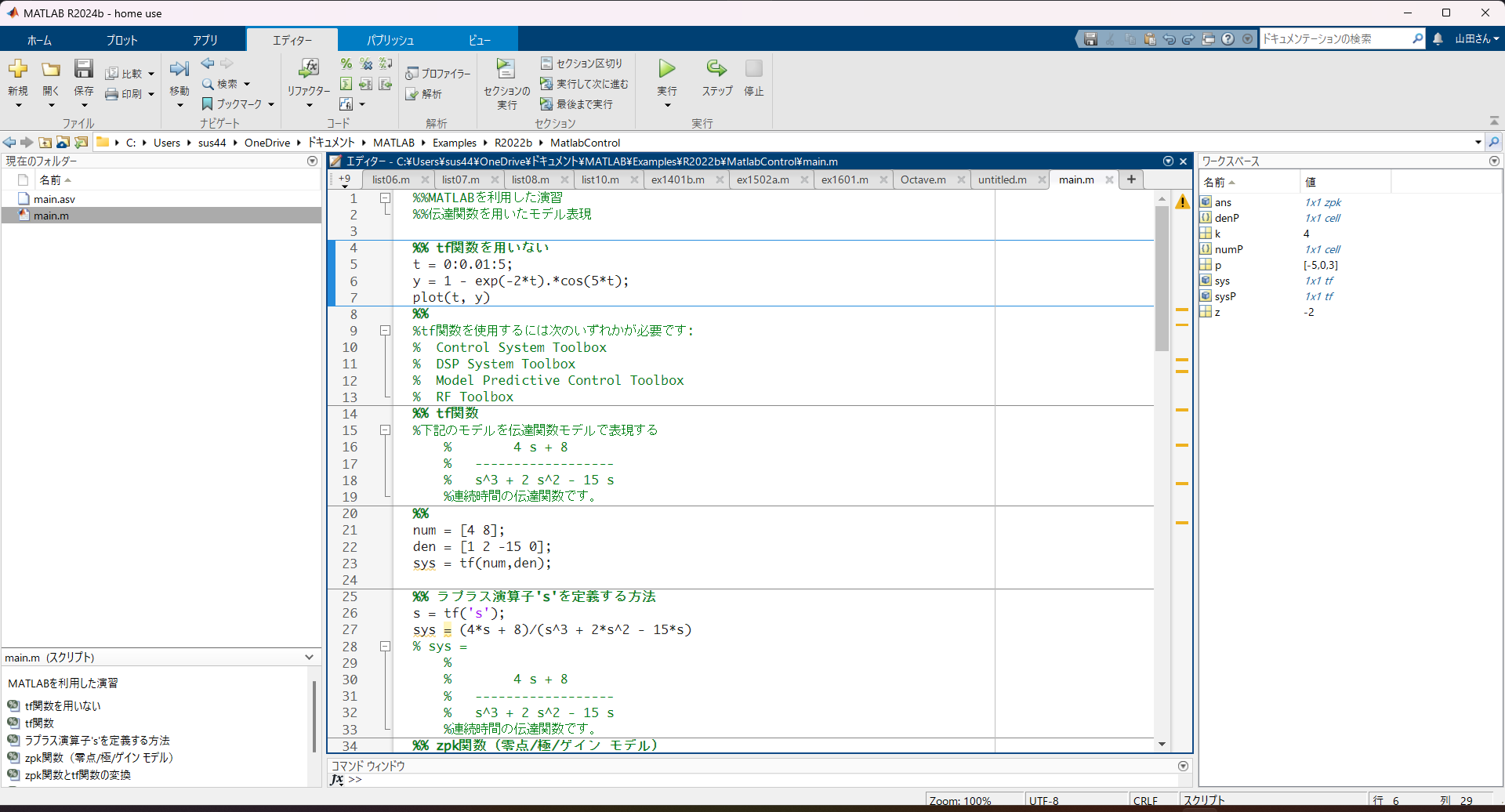
MATLABを利用した制御演習
tf関数を使用するには次のいずれかのToolboxのインストールが必要です Control System Toolbox DSP System Toolbox Model Predictive Control Toolb […]

PythonControlライブラリを利用した制御演習
Python Control Systems Libraryを用いて、Pythonによる制御設計の基本コードを記述しています。 Pythonで下記の様なグラフを作成しましょう main.py functions.py p […]
プロモーションビデオ/過去投稿動画
2016/5/1 YouTube投稿
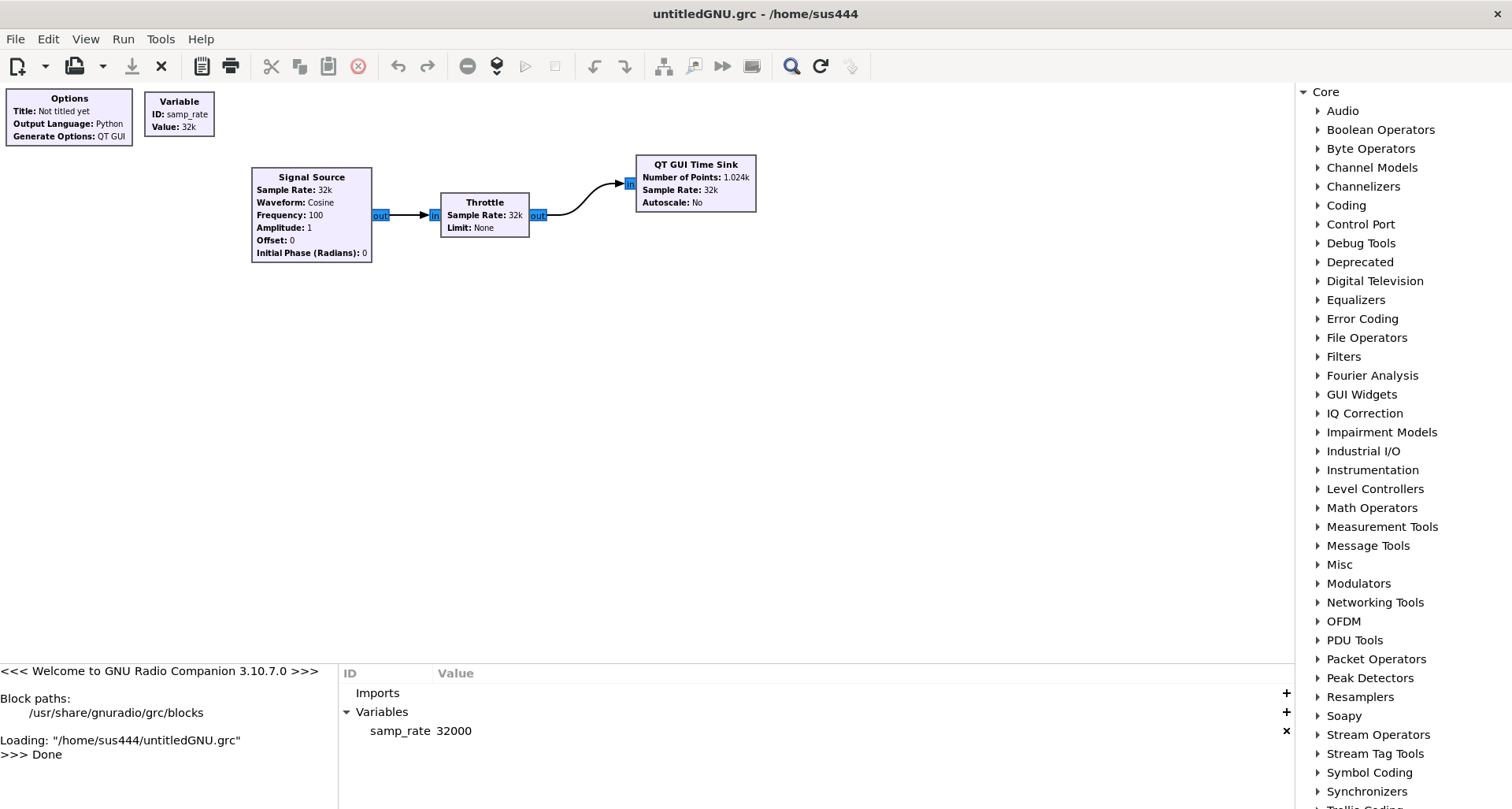
GNU Radio Companion
GNU Radio Companion
