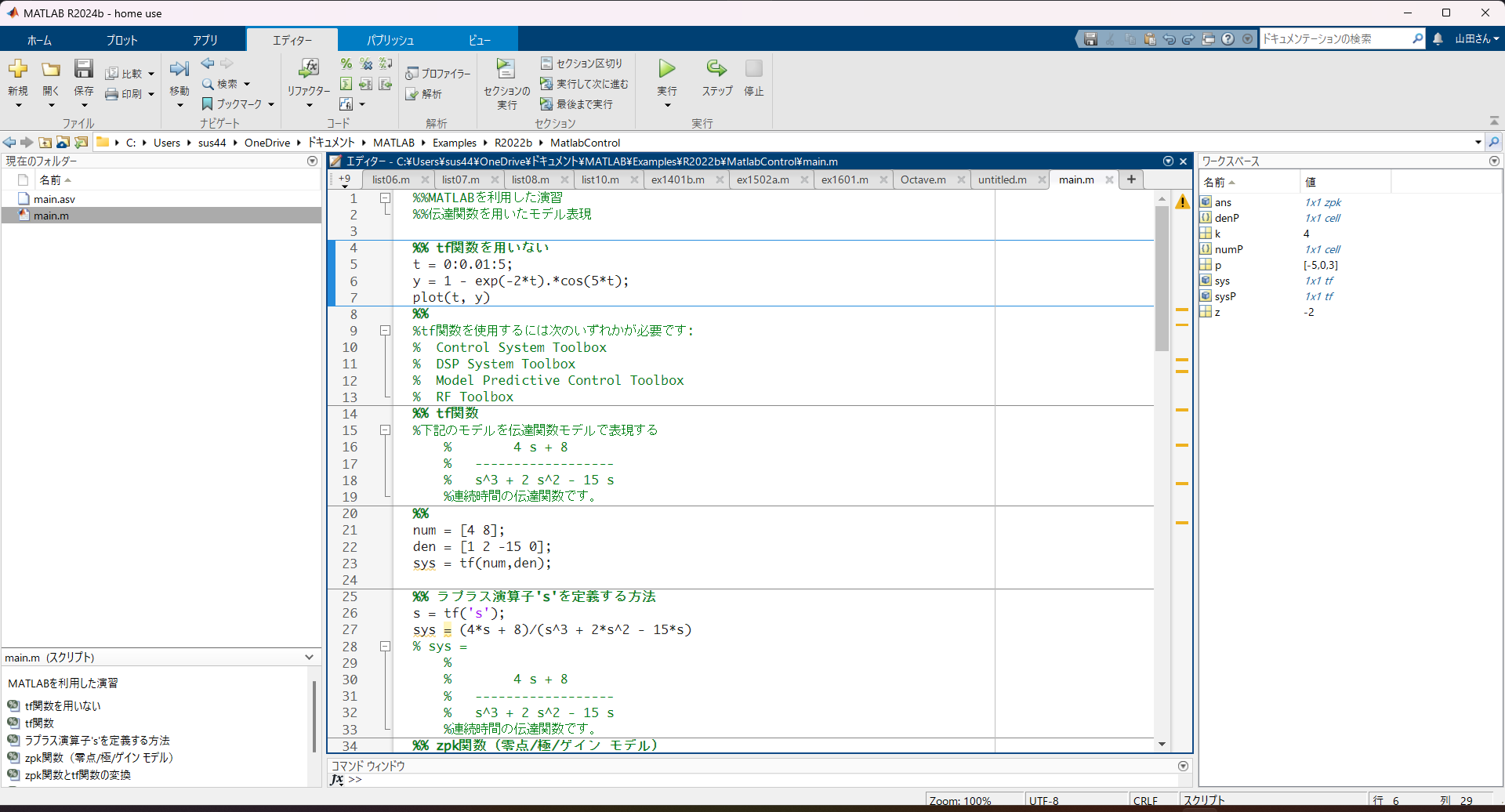
tf関数を使用するには次のいずれかのToolboxのインストールが必要です
Control System Toolbox
DSP System Toolbox
Model Predictive Control Toolbox
RF Toolbox
伝達関数を用いないケース
t = 0:0.01:5;
y = 1 – exp(-2*t).*cos(5*t);
plot(t, y)
伝達関数(tf)を用いたモデル表現
tf関数
下記のモデルを伝達関数モデルで表現する
4 s + 8 / s^3 + 2 s^2 – 15 s
num = [4 8];
den = [1 2 -15 0];
sys = tf(num,den);
ラプラス演算子 ‘s’ を定義する方法
s = tf(‘s’);
sys = (4*s + 8)/(s^3 + 2*s^2 – 15*s)
zpk関数(零点/極/ゲイン モデル)
z = [-2]; p = [-5 0 3]; ←数字の間に半角スペース
k = 4;
sysP = zpk(z, p, k)
zpk関数とtf関数の変換
ans = zpk(sysP)
%ans =
4 (s+2)
————-
s (s+5) (s-3)
%連続時間の零点/極/ゲイン モデルです。
sys = tf(ans)
% sys =
4 s + 8——————
s^3 + 2 s^2 – 15 s
% 連続時間の伝達関数です。
tfdata関数()伝達関数の分子、分母の抽出
sysP = tf([4 3], [1 2 -15 0])
% sysP =
% 4 s + 3
% ——————
% s^3 + 2 s^2 – 15 s
% 連続時間の伝達関数です。
[numP, denP] = tfdata(sysP)
% numP =
% 1×1 の cell 配列
% {[0 0 4 3]}
% denP =
% 1×1 の cell 配列
% {[1 2 -15 0]}
 using WordPress and
using WordPress and
Comments are closed